docs: design doc for the revamp of the running time calculation #168
Conversation
Réunion du 31/01/2024.Que fait STDCM aujourd'hui ?4 manières différentes d'interagir avec le CDM :
Exemple déroulé d'un appel de calcul de marcheInformations d'entrée au calcul de marche
|



Réunion du 07/02/2024
|


0d8a629 to
ab29546
Compare
Réunion du 21/02/2024, pseudo-implémentationfn filter_by_range -> fastoche
fn margin_driver -> mareco
fn merge_sets -> fastoche
fn find_most_restrictive_action(t, dt, pos, driving_instructions) -> pas fastoche mais bon courage au développeur
// simulation de base (tendue) -> target_schedule vide (simplement une relaxed_time_section), margin_driver == noop
// simulation finale (détendue/mareco) -> target_schedule avec contraintes (utilisant les résultats de marche tendue)
fn cdm_simulation(target_schedule: &[(Horaire, Position)] + d'autres trucs, abstract_driving_instructions, path_physics_properties, rolling_stock, train_init_state, margin_driver) {
concrete_driving_instructions = compiler(abstract_driving_instructions, path_physics_properties, rolling_stock);
state_log = [train_init_state];
for (margin in target_schedule.margins) {
filtered_concrete_driving_instructions = filter_by_range(margin.range, concrete_driving_instructions);
for (v1 in search) {
margin_concrete_driving_instructions = margin_driver(v1, filtered_concrete_driving_instructions, path_physics_properties);
instructions = merge_sets(filtered_concrete_driving_instructions, margin_concrete_driving_instructions);
new_state_log = simulation(margin.range, state_log[len(state_log) - 1], instructions, path_physics_properties, rolling_stock);
}
state_log.extend(new_state_log);
}
if let Some(range) = target_schedule.relaxed_time_section {
new_state_log = simulation(range, state_log[len(state_log) - 1], concrete_driving_instructions, path_physics_properties, rolling_stock)
state_log.extend(new_state_log);
}
state_log
}
fn compiler(abstract_driving_instruction, path_physics_properties, rolling_stock) -> ConcreteDrivingInstruction;
struct AbstractDrivingInstruction { /* voir séance du 14/02/2024 */ }
struct ConcreteDrivingInstruction {
curve: EspaceTempsVitesse,
abstract_driving_instruction: AbstractDrivingInstruction,
}
fn simulation(range, train_state, driving_instructions, path_physics_properties, rolling_stock) {
simulation_output = []
for (t = start_time ; pos < range.max; t += dt) {
train_state, driving_instructions = update_driving_instructions(train_state, driving_instructions);
action = find_most_restrictive_action(t, dt, pos, train_state.active);
simulation_output.extend(integration(action));
pos = simulation_output.positions[len(simulation_output.positions) - 1];
dt = cursed_whatever_function();
}
simulation_output
}
// pending instructions -> driving_instructions
// received instructions -> train_state.received_instructions
// active instructions -> train_state.active_instructions
// retired instructions -> garbage collected
// train_state contient les instructions reçues et actives
// driving_instructions contient les instructions pas encore reçues
fn update_driving_instructions(train_state, driving_instructions) {
for (instruction in driving_instructions) {
if instruction.received {
train_state.received(instruction);
driving_instructions -= instruction;
}
}
for (instruction in train_state.received_instructions) {
if instruction is now active {
// make obsolete (retired) some instructions
// transfer from receive to active the 'instruction'
train_state.activate(instruction);
}
}
for (instruction in train_state.active_instructions) {
if instruction.end_of_application is on {
train_state.active_instructions -= instruction;
}
}
train_state, driving_instructions
} |
c9a7bd1 to
e3c82eb
Compare
There was a problem hiding this comment.
A few typos that I'll push directly (but leaving the comment so they can be seen). A few other comments that may need to be discussed. The last section, in its current state is relatively well explained, let's see if this afternoon meeting helps to clear a path.
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/running-time-calculation/_index.en.md
Outdated
Show resolved
Hide resolved
0469607 to
4d8c4bd
Compare
4d8c4bd to
fe825fe
Compare
content/docs/reference/design-docs/train-sim-v3/base-simulation.svg
Outdated
Show resolved
Hide resolved
|
@woshilapin @Castavo can someone pick up the branch / the review? |
|
As discussed today, maybe we should consider moving the state reconciliation logic into the driver behavior module. The current process is: // At simulation step T:
// Driving instructions
let instructions = [DI1, DI2, DI3]
// Driver behavior PER INSTRUCTION
let candidates = [db(DI1), db(DI2), db(DI3)]
// Reconciliation
let final_curve = speeding_curves_reconciliation(candidates)The reconciliation part is tricky because it operates on a list of curves. We can defer the reconciliation step to the driver behavior which would operate on a list of driving instructions instead. // At simulation step T:
// Driving instructions
let instructions = [DI1, DI2, DI3]
// Driver behavior application, which is now responsible of the reconciliation of the instructions
let final_curve = driver_behavior([DI1, DI2, DI3])This way, if two instructions are conflicting, the driver behavior can reconciliate these by Caution To be further discussed. |
7f186af to
133b699
Compare
|
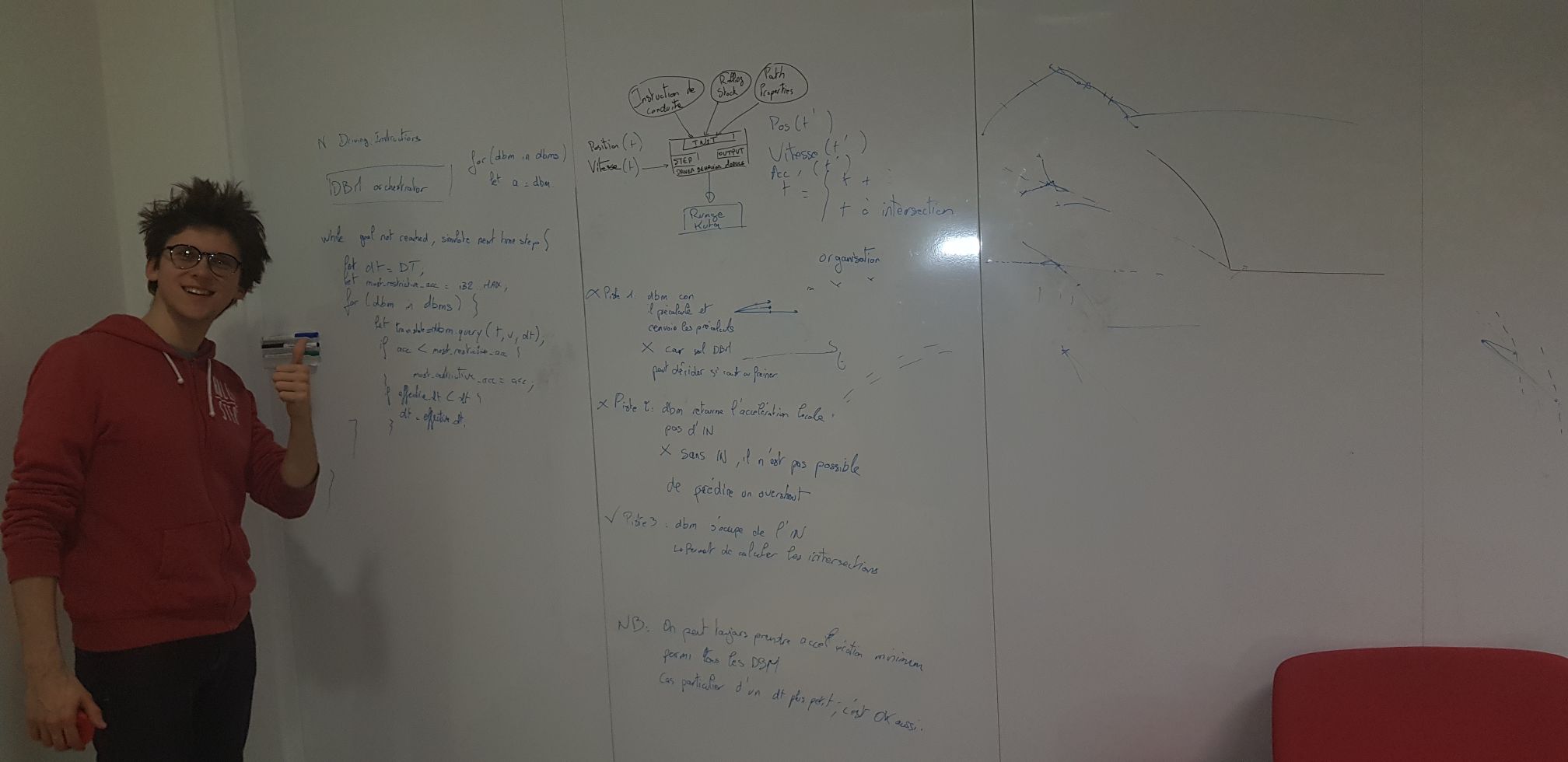
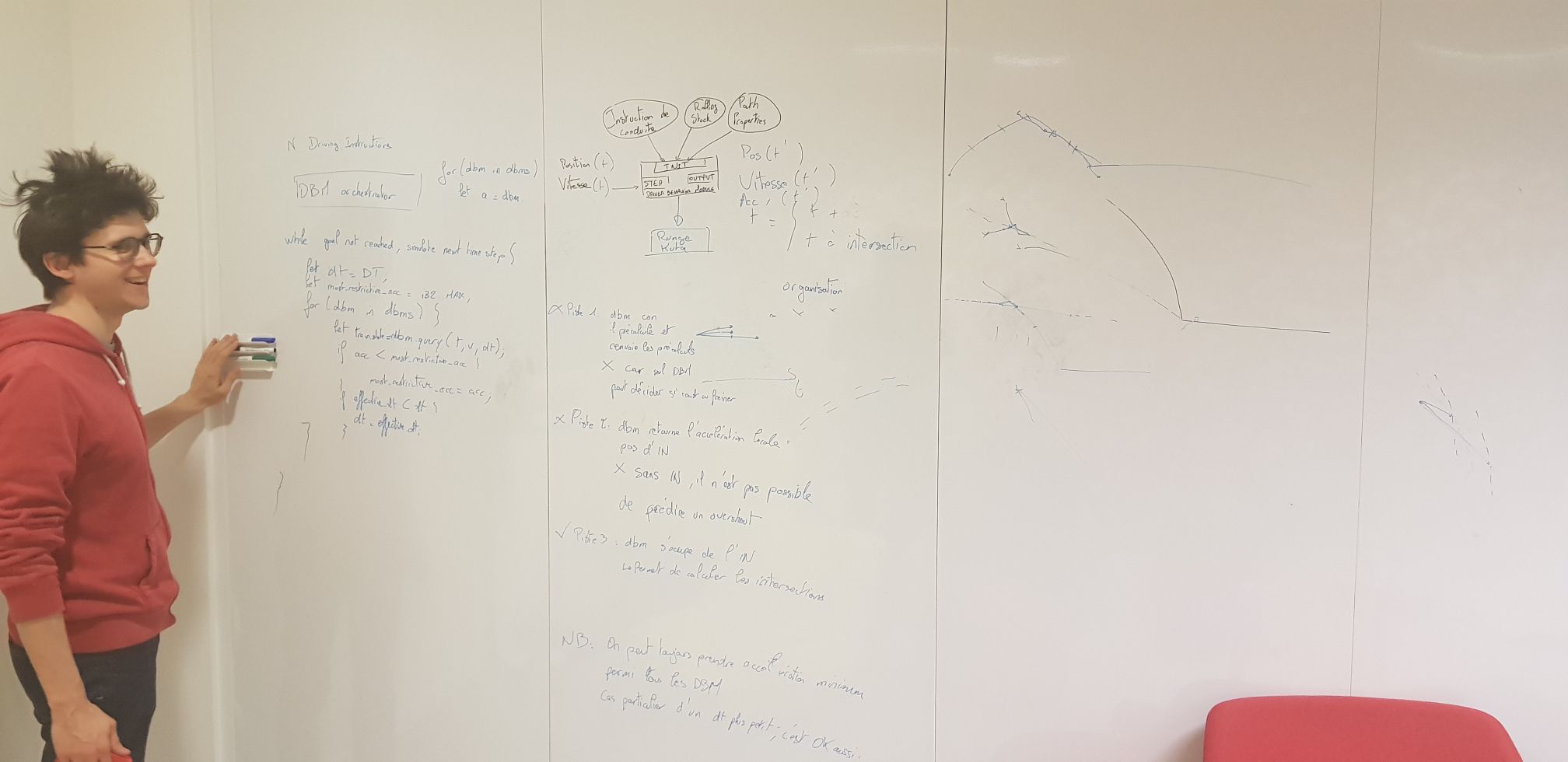
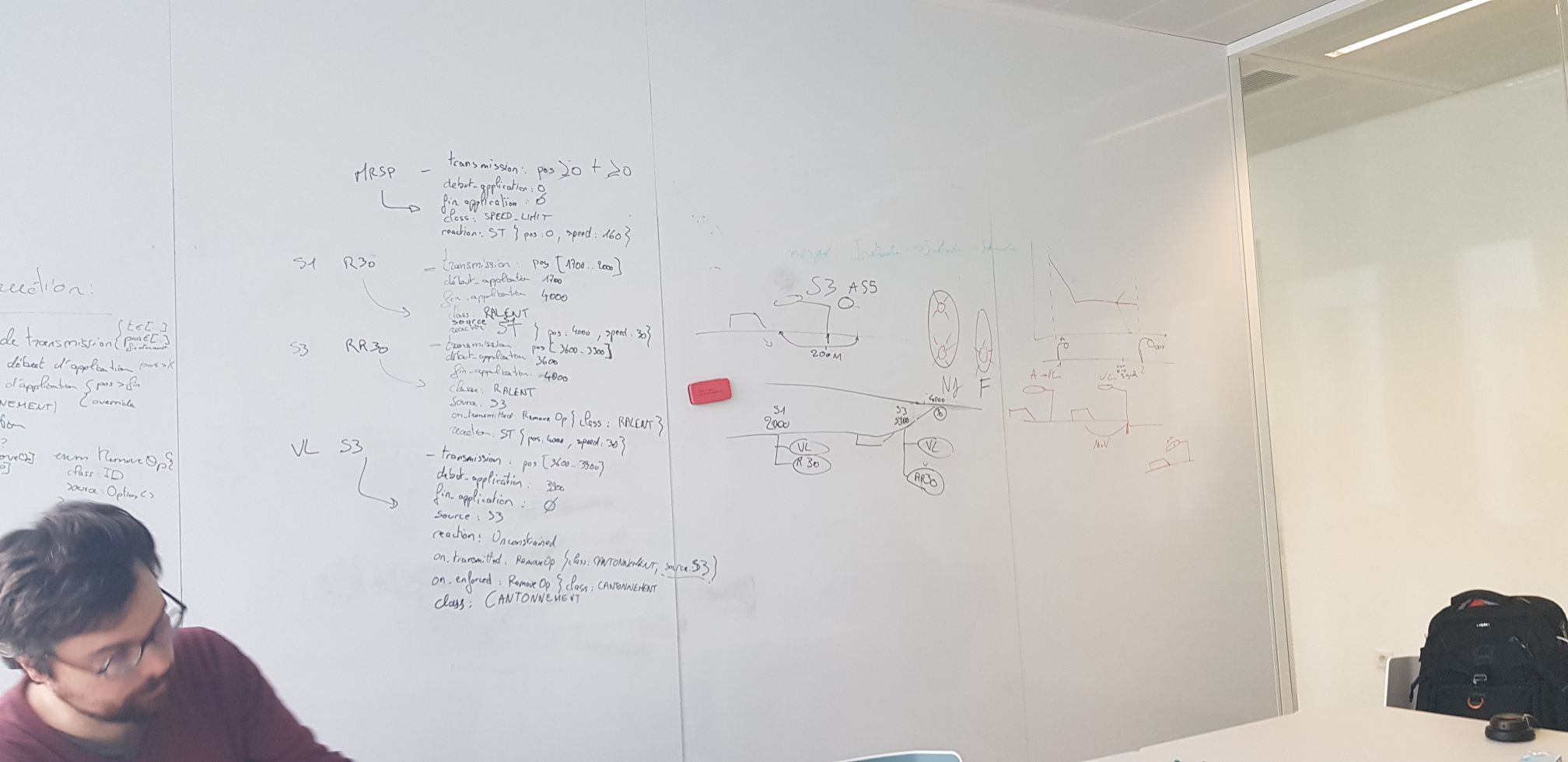
When picking up this PR, we were tempted to change the model described. We then realized we did not have enough time so we simply settled for clarifying the description of the model. We planned on adding examples of driving instructions generated from constraints, but none of us can afford the time, so we'll just add the photos we took from the workshop in this thread Pictures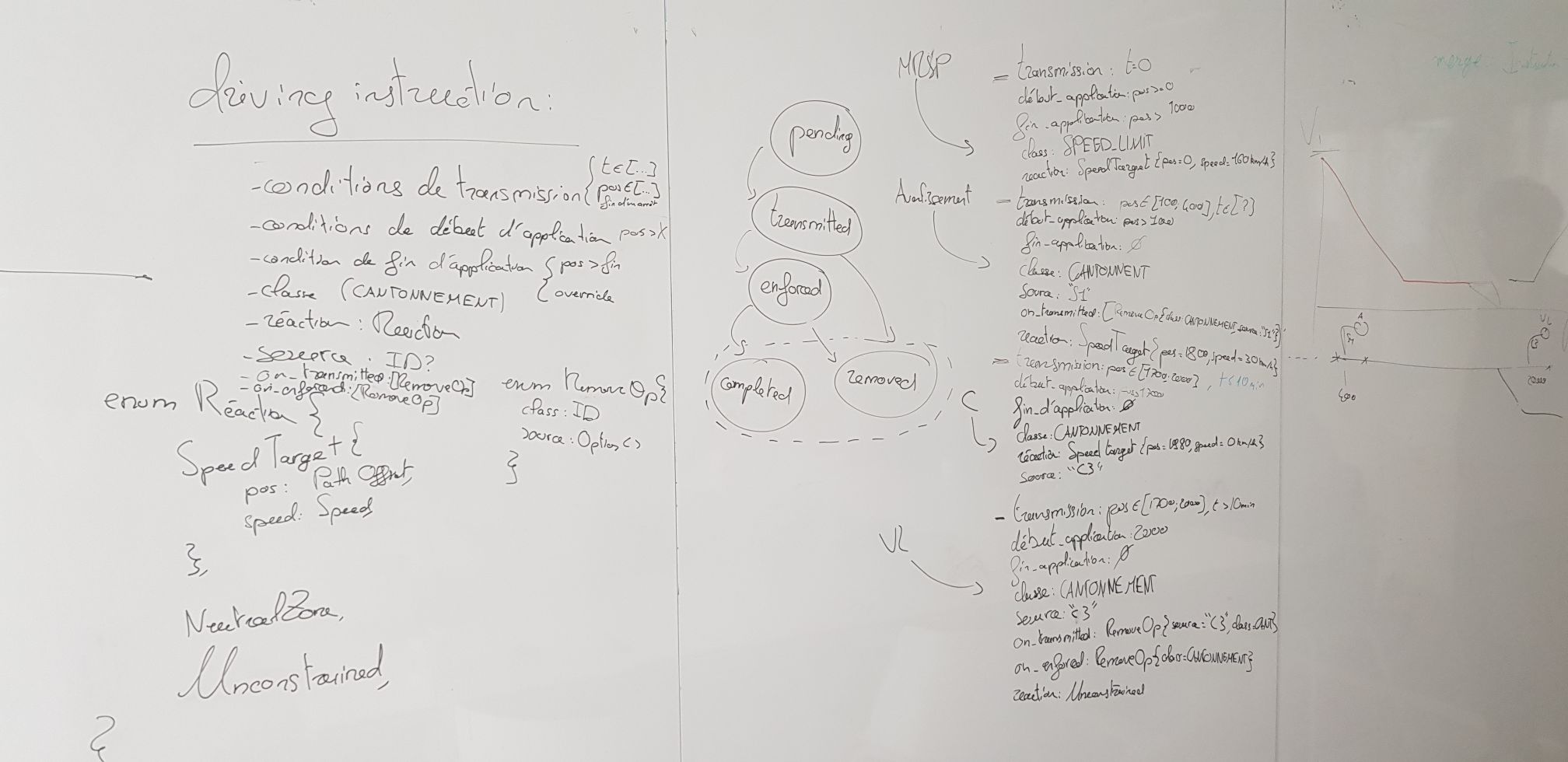
|
9ce5786 to
d9248a9
Compare
|
Looks good to me, thanks for the clarifications and the work on these last week. I can't approve (since I opened the PR). |
content/docs/reference/design-docs/train-sim-v3/driver-behavior-modules.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/train-sim-v3/driver-behavior-modules.en.md
Outdated
Show resolved
Hide resolved
content/docs/reference/design-docs/train-sim-v3/driver-behavior-modules.en.md
Outdated
Show resolved
Hide resolved
3f19d36 to
7ce4442
Compare
Réunion du 24/01/2024, notes de @clarani
Objectifs
Quels sont les objectifs de la journée ? Design les nouvelles API du calcul de marche
Quelles contraintes ?
→ pouvoir gérer des contraintes bornées dans le temps (temps système, réaction signalisation)
→ pouvoir rajouter des contraintes dynamiquement, ce qui permettra de faire de la simulation multitrains
Contexte
Caractéristiques du modèle actuel
→ l’état du train se résume à un couple position/vitesse uniquement à un point de la courbe
→ le calcul de marche est calculé par morceaux, mais pas d’une manière non causale
→ recollage un peu bancal entre les morceaux
→ backtracking pour les marges
Quels sont les problèmes du modèle actuel ?
→ impossible d’ajouter des paramètres supplémentaires comme l’état d’une batterie, un temps système…
Marges: les marges de construction vont disparaître. La seule ambiguïtés encore sur le comportement avec les marges, c’est au niveau des transitions entre 2 sections qui ont des pourcentages de marge différentes: où se fait la transition ?
Propositions
Nouvel algo des marges
L’algo actuel des marges “pupet” le calcul de marche: autrement dit, il est à l’extérieur du CDM et le rappelle/itère. Cela complexifie grandement la gestion des marges et l’implémentation des marges marreco.
Nouvel interface de Margin Strategy: le Margin Strategy prend en entrée une portion de chemin (avec ses propriétés), la marche tendue sur cette portion du chemin, le matériel roulant, un coefficient de ralentissement et la vitesse du train au début de la section (pour assurer la continuité de la courbe), et sortira des éléments de ralentissement (des nouvelles limites de vitesse, des contraintes en vitesse (qui remplacent des marches sur l’erre), des nouveaux coeffitients de freinage/accélération).
Avec le résultat du Margin Strategy, on peut relancer un calcul de marche sur la portion concernée uniquement, comparer le nouveau temps de parcours et le temps de parcours de la marche tendue, puis si nécessaire, ajuster le coefficient de ralentissement et relancer Margin Strategy.
Une fois que l’on a atteint un temps de parcours satisfaisant, on passe à la portion suivante du chemin. La transition de marge est donc entièrement prise en charge par le segment suivant (à droite).
Dans le nouvel algo, on passera les marges à l’intérieur du CDM et on utilisera le Margin Strategy, avec une boucle de rétroaction pour ajuster les éléments de marges (marches sur l’erre, abaissement du plateau de vitesse du MRSP et nouveaux coefficients d’accélération/de freinage).
Nouveau fonctionnement des marges linéaires actuelles qui ne sont pas physiques: le calcul de marche prendrait un paramètre marges et pourrait lui-même abaisser au fur et à mesure les plateaux de vitesse du MRSP, rajouter des marches sur l’erre et enfin ajuster les coefficients d’accélération/de freinage.
Calcul de marche
Points à traiter pour les nouveaux APIs
→ contraintes qui varient en fonction de la position du train ou du temps
→ sera utile pour les ralens 30, 60 et TIV mobiles, mais aussi les arrêts en gare
Contraintes spécifiques pour STDCM
→ pouvoir reprendre un calcul de marche à un endroit donné
→ pouvoir spécifier des arrêts avec des temps
Réflexions / Débats
→ Doit-on garder le MRSP à l’intérieur du CDM ou le sortir ?
Si on le garde à l’intérieur, on doit l’avoir en output, mais on peut tout simplement le sortir. Autant le sortir finalement car ça réduirait la complexité dans le CDM.
→ Propriétés physiques du chemin et échantillonnage ?
[…]
→ Gestion des courbes de freinage
Le CDM devra prendre en argument le MaxSpeedProfile (qui comprend les courbes de freinage), lui-même obtenu via un CDM. On devra faire du backtracking et refaire la simulation jusqu’à la fin (donc on reste causal, on ne “recolle” pas).
Finalement, on ne prend pas le MaxSpeedProfile en argument, mais uniquement la vitesse finale. On calculerait le MaxSpeedProfile à l’intérieur du CDM.
→ Marges de régularité
Il faudra recalculer tout le trajet.
Résumé
Le système actuel n’est plus valide car on peut avoir plusieurs MaxSpeeds sur tout le chemin (variation du MaxSpeed avec le temps).
Quel que soit le point sur le chemin où on se trouve, on a au moins une contrainte MaxSpeed, voire plusieures. Toutes ces contraintes sont à minima bornées dans l’espace, et potentiellement dans le temps.
On calcule les courbes de freinage les plus conservatrice associées à chaque contrainte, puis on les ordonne par le point de début de freinage.
Dans la nouvelle implémentation, on propose d’intégrer jusqu’au point de la prochaine contrainte (=tracer le MaxEffort), vérifier si la contrainte est à prendre en compte ou non étant donné l’état du train (temps/position/vitesse). On passe ensuite à la contrainte suivante.
Les types de contraintes sont:
→ un signal qui change
→ les extrémités de LTV
→ les extrémités de zones BP/CC
→ les changements de palier de MRSP
→ les arrêts
Questions